After seeing Theo Jansen mechanism on YouTube
I wanted to do my own walking machine. In fact
it was an old dream that dates back to the time
I was 13 years old when I saw the Empire Strikes
Back. That's why I wanted to do a four legs
walking machine with a synchronisation mechanism
for the legs.
My model never walked, it has no motor, so I made
this step by step animation to show the
synchronisation mechanism and posted it on YouTube
in may 2008.
NOTE À L'INTENTION DE CEUX QUI SOUHAITENT CONSTRUIRE LEUR PROPRE MODÈLE
Bonjour,
NOUVEAU !! un pdf de 7 pages avec des plans. Je ne garantis rien, il s'agit des plans à partir desquels je vais tâcher de peaufiner mon modèle,
sinon il y a sur ces pages presque toutes les données importantes, pour le reste il faut se débrouiller.
Faites quand même attention à ce que le centre de gravité du marcheur soit sur l'axe central (voir un peu vers l'avant).
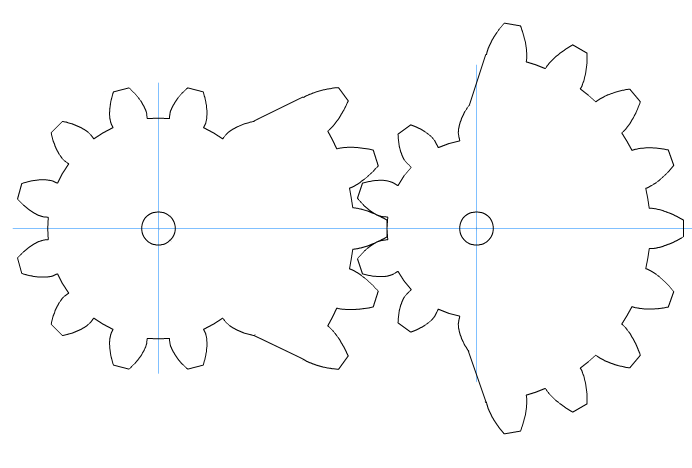
La façon dont sont disposés les engrenages détermine l'ordre dans lequel se passent les choses (c'est un programme en quelque sorte),
il faut que la roue dentée du côté gauche et celle du côté droit soient tournées à 180° l'une de l'autre.
Des pièces de la patte se touchaient, j'en ai alors dessiné une autre afin que cela ne se produise plus (elle est dans les "possible modifications"),
et je l'ai également allongée un peu afin que le modèle ait l'air moins pataud.
Pensez à mettre une vidéo sur YouTube et envoyez moi le lien.
Bon travail !
Dominique Studer
NOTE FOR THOSE WHO WISH TO BUILD THEIR OWN MODEL
Hello,
NEW !! A seven pages blueprints pdf. There is no guaranty at all, this is where I start hoping to make a better model.
all important data are on this page, for the rest you have to manage .
Make still careful that the walker 's center of gravity is on the central axis (and also slightly forward) .
The way gears are arranged determines the order in which things are going ( it's a program in some way )
it is necessary that the toothed wheel of the left and the right side are oriented 180 ° from each other .
Parts of the leg came in contact , I then drew another so that it does not happen again (it is in the "possible modifications" ) , and I also extended it a little so that the model has a less clumsy appearance.
Remember to put a video on YouTube and send me the link.
Good work !
Dominique Studer
OTHER 4 LEGS WALKING MACHINES
December 2008 -
LAUFMASCHINE
- A German walker using the same leg synchronisation mechanism.
................................................................................................................................... Return to top
木犬 MOKKEN
( Wooden Dog ) - A Japanese walker made by Mr. Murayama Yuki.
Mr Yuki Murayama, student of Tokyo institute of technology sent me some pictures and movies fom his walker "Mokken".
It has one motor, it uses Geneva stop mechanism and Chebyshev linkage.
................................................................................................................................... Return to top
June 2010 -
WALKING MACHINE GASTER und FRANK
- Another german walker using the same leg synchronisation mechanism.
................................................................................................................................... Return to top
September 2010 -
WALKING ROBOT 2
- with gears outside
Dominique,
Here's a link to my walking robot based on your design. I incorporated your modifications (moving the gears to the outside, etc.) and they work fine. It's laser cut from 3mm acrylic.
Dave West
................................................................................................................................... Return to top
December 2010 -
Theo Jansen Walking Machine
- Visoka Tehnicka Skola Bjelovar
A very nice model with translucid gears from Croatia.
I found this video on YouTube.
................................................................................................................................... Return to top
March 2013 -
ZON
- Robot Marcheur du groupe L22 de l'IUT GMP Jean Monnet à Saint Etienne
A team of french students made this walker for a contest in 2013
I found this video on YouTube.
................................................................................................................................... Return to top
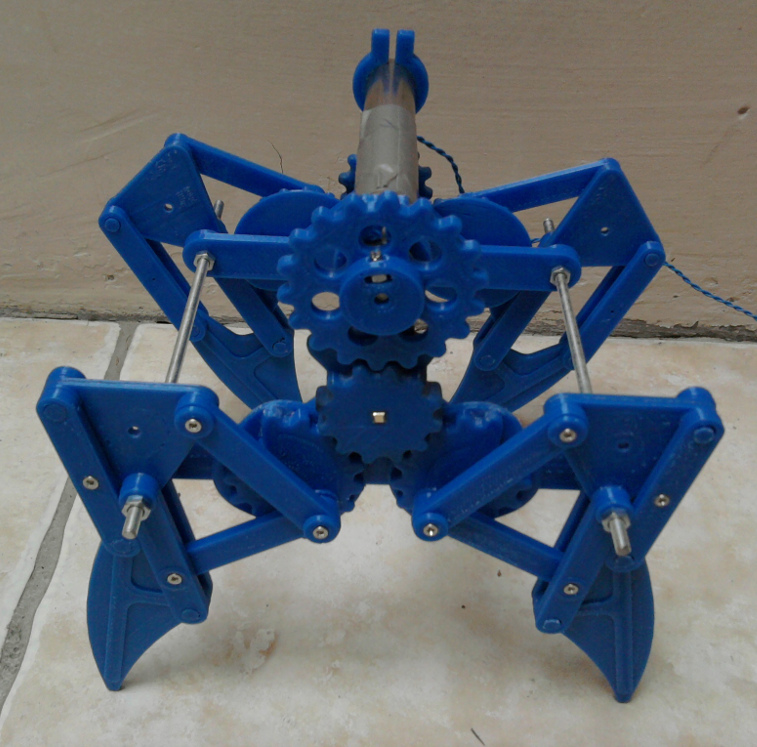
May 2014 -
3D PRINTED Walking Machine
- with gears outside
Hi there,
I came across your webpage about your 4 leg walking machine
some time ago and was very impressed with the clever mechanism.
I remembered about it when I finished building my 3D printer
and thought it would make a good first project for it.
I attach a photo and video which might interest you.
I put the gears on the outside of the frame as you suggested,
which makes the build much simpler. The information that you provided
on your webpage was very clear and most useful, thank you!
................................................................................................................................... Return to top
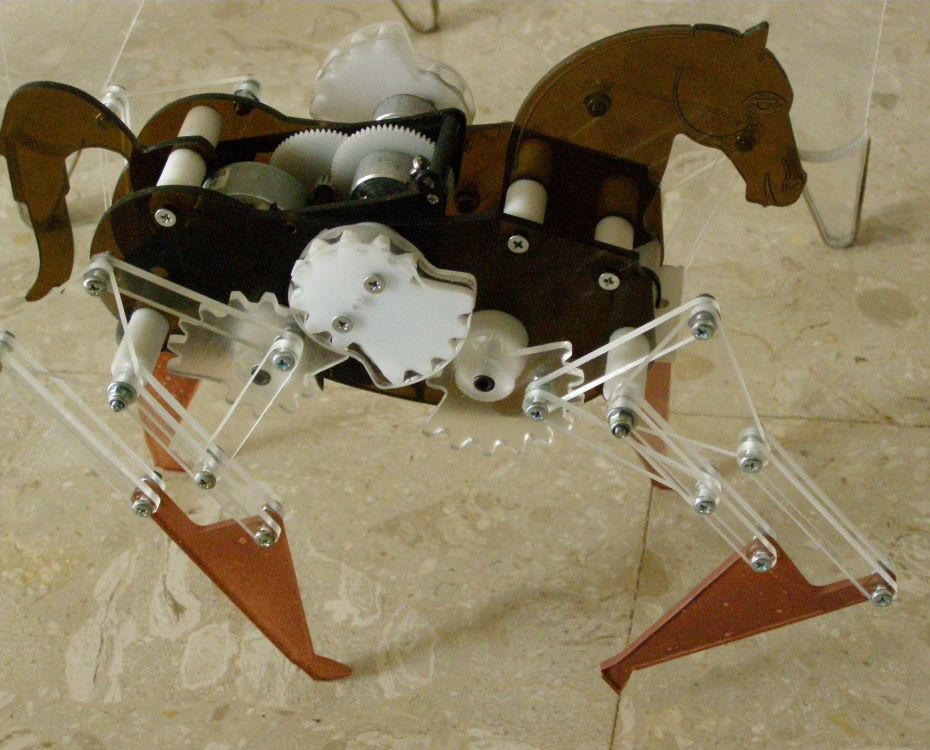
April 2017 -
Laser cut and 3D printed Walker
Hi! I love what you did with Theo Jansen’s mechanism, especially making it a 4 legged walker with the changing gear ratios. I took your design and made it into something 3d printable, and followed your advice for having it driven by a DC motor. Man, getting the tolerances and gearing right with 3d printing was a pain. I also decided to use cardstock that was cut out using a silhouette paper cutter for the ‘knees’ and ‘feet’.
It’s powered by a single hobby DC motor and 3 AAA batteries. I’ll send more info (including the files) soon, once I write up the instructions for a class I’m going to have regarding it.
Thanks for your great site!
John Olthoff
click thumbs to enlarge
August 2019 - News !
I'm very happy, he just sent me a model to build. I will add pictures and make videos.
................................................................................................................................... Return to top
July 2017 -
4 leg walker - 4 bacaklı yürüyen robot
- a CNC cut wooden walker , with modified legs.
- A.J. Ingram, "A new type of mechanical walking machine", Rand Afrikaans University, 2004.
The pdf can be downloaded
here
- A.J. Ingram, Numerical kinematic and kinetic analysis of a new class of twelve bar linkage for walking machines :
here.
- Chih-Ching Hung, "On the Mechanism Design of A Hybrid 8-link Type Walking Horse", Taiwan, 2001.
The pdf can be downloaded
here.
- Kao-Chu Chiang, "A Reconstruction Design of Lu-Ban's Wooden Horse Carriage with 10-bar Linkages", National Cheng Ku University, Taiwan, 2005.
The pdf can be downloaded
here.
- Theo Jansen legs dimensions can be found
here or
here.
- A simulator where you can test your own proportions for the linkages is on
mekanizmalar.
Just change the red and yellow bars to 129.72 and 279.11 .
- Theo Jansen creations, made with LEGO on
TechnicbrICKs
- TE+ND Rover, it uses the mechanism with 8 legs to reduce the weight per leg : tendrover.com
- Ugears Horse, because the gears are small they had to reduce the number of teeth, but they work the same.
You can see them at 2:41:23 youtu.be/kip8OtXc1ck?t=9680.